안녕하세요. 평생개발자 입니다.
로봇팔 제작 프로젝트 7번째 포스팅!!!
취미로 시작해서 점점 프로젝트가 커지고 있습니다. 재미가 있다가도 집에서 일하는 것 같고 직장 일과 묘하게 겹치면서 집에서도 근무하는 느낌입니다.
이번 포스팅은 SW 에서 로봇 동작을 시뮬레이션하고, 실제로 로봇이 실제 위치로 움직이는 것을 목표로 두고 있습니다.
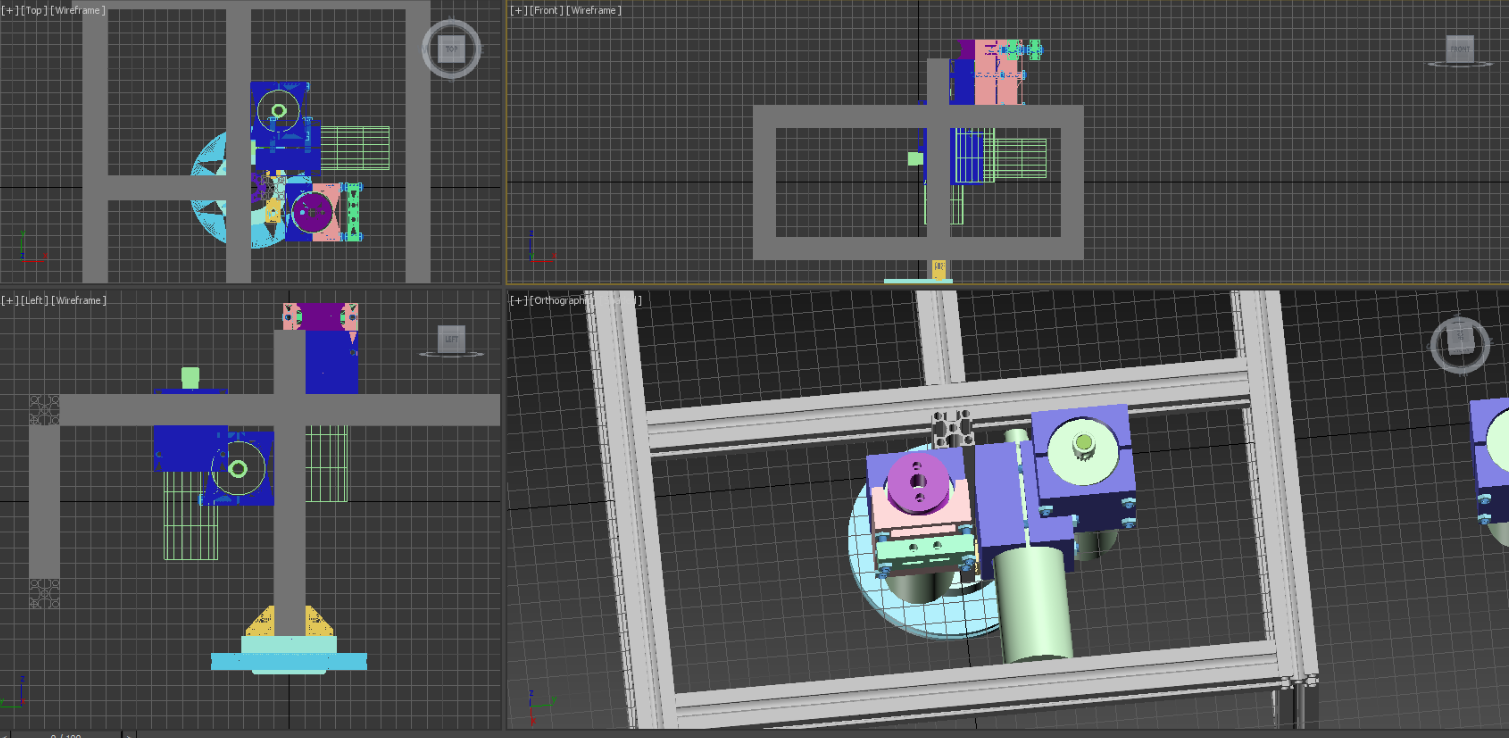
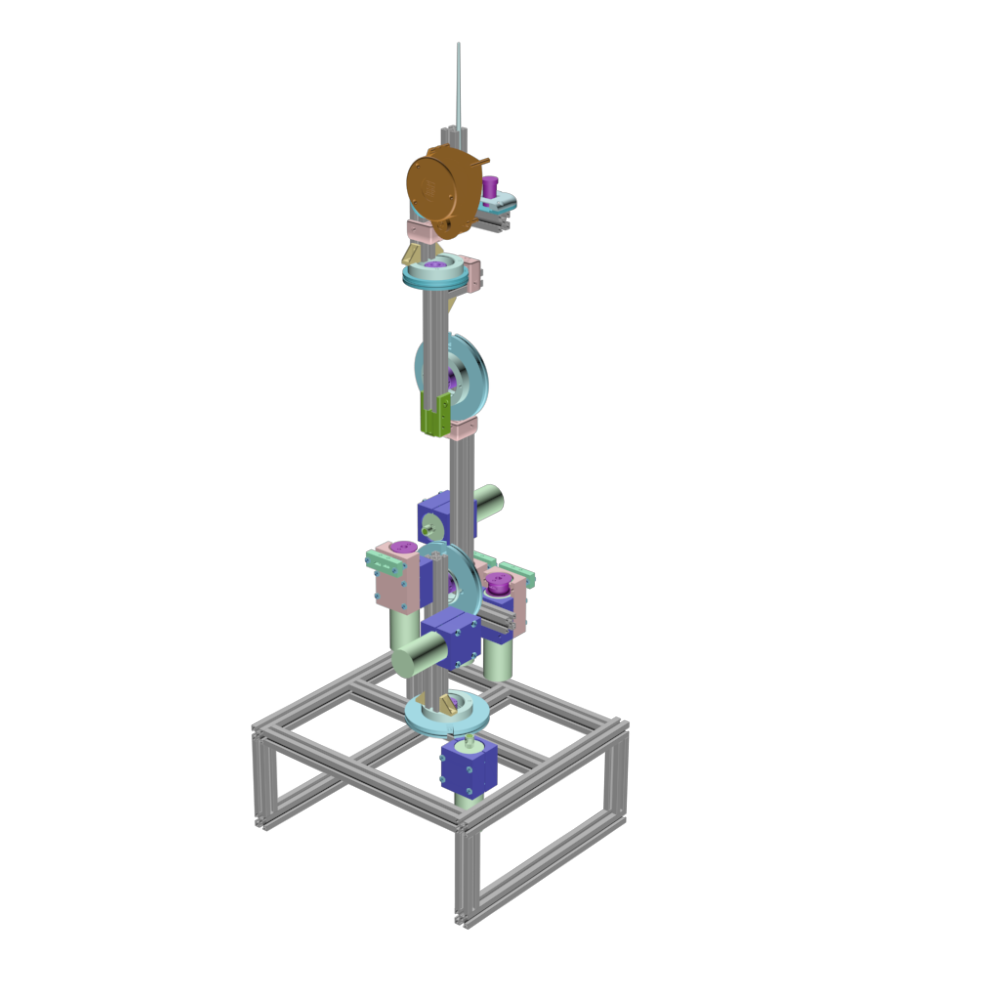


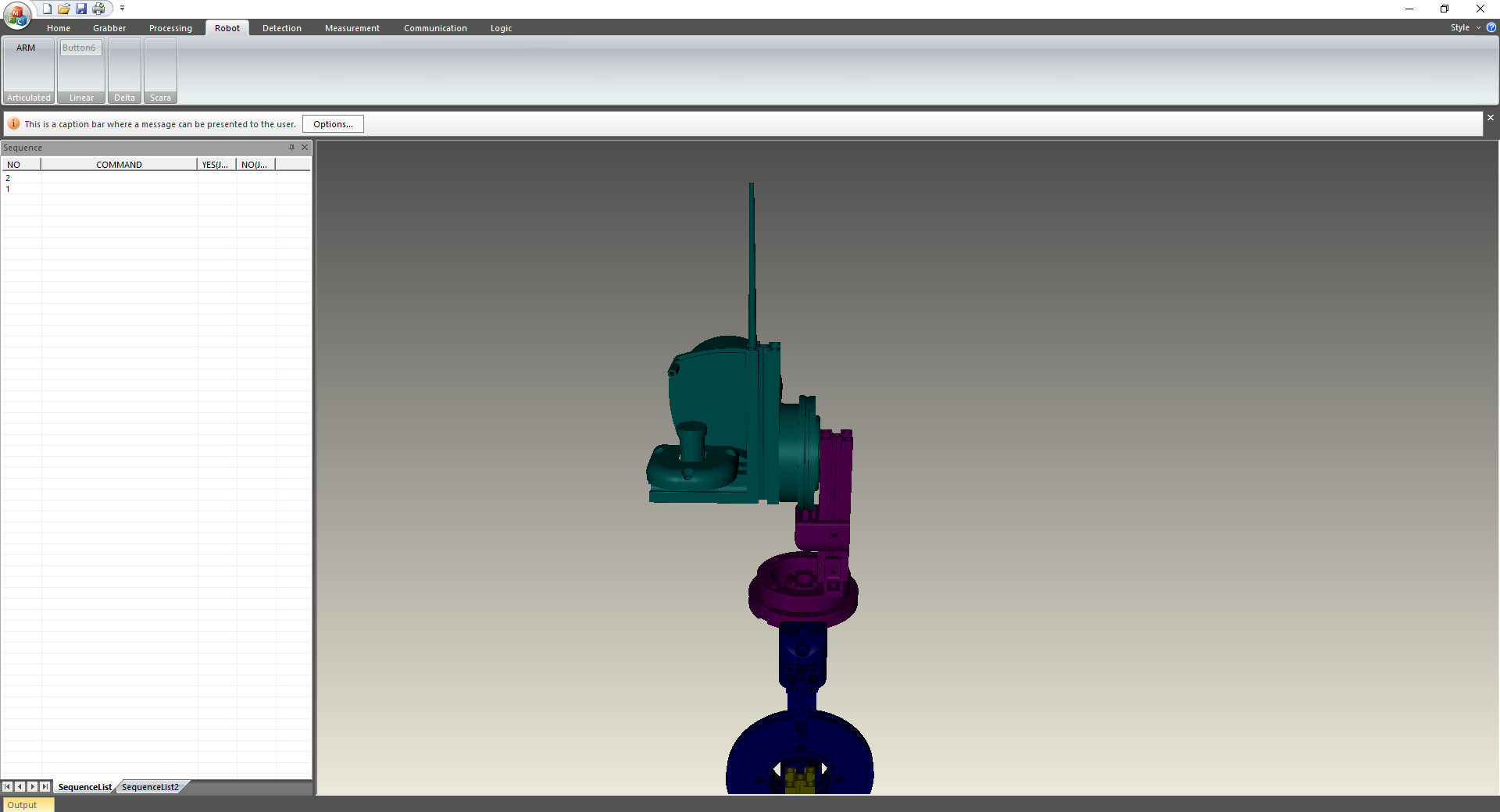
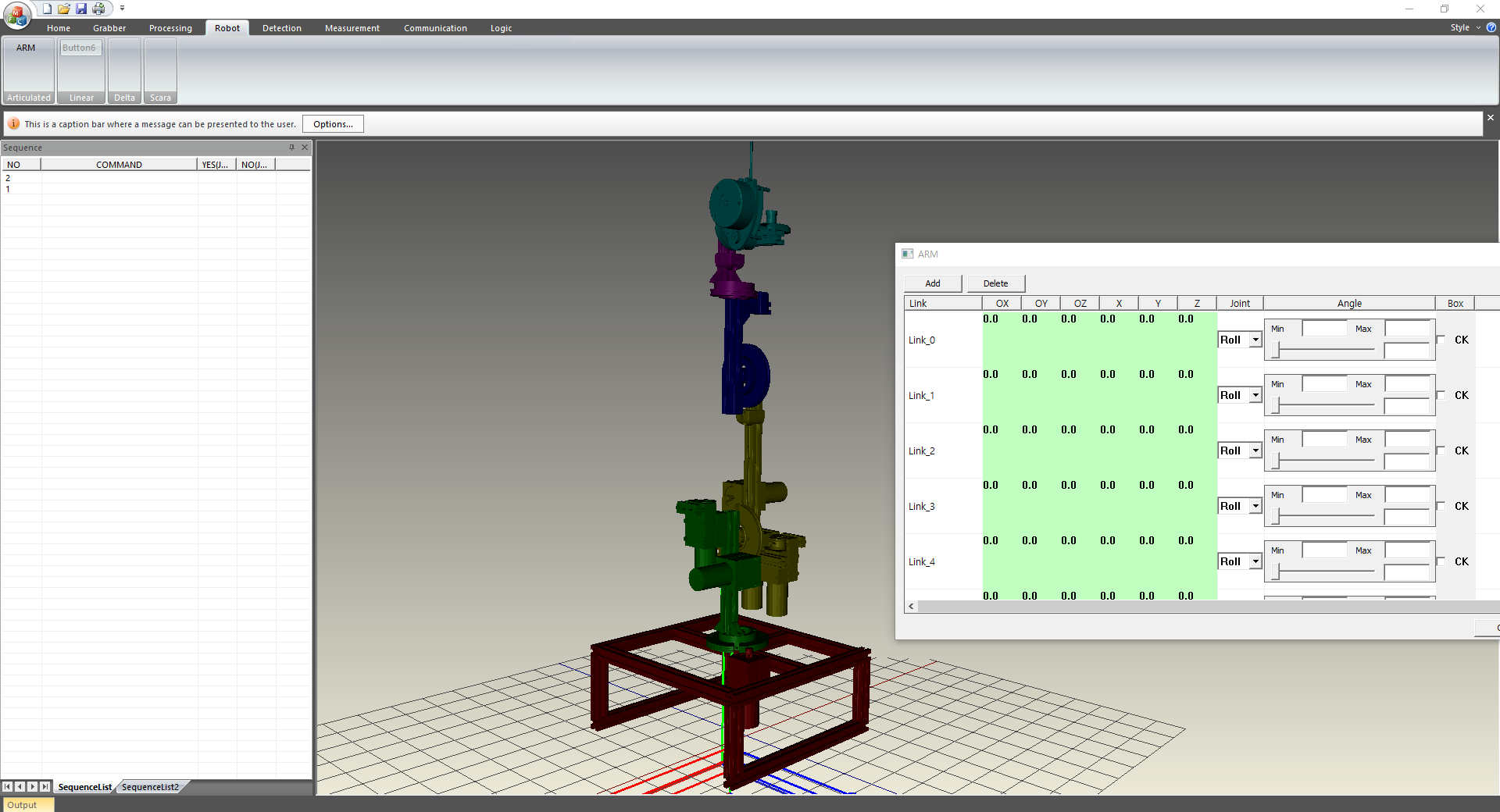
로봇 시뮬레이션에 필요한 inverse kinematics, 충동 체크, Lader scan 등을 수행하기 위한 GUI
사용된 SW library
Eigen : 선형대수 계산
OpenGL : 그래픽 표현
MFC : 윈도우 프레임 GUI
로봇 DOF 각도 테스트 영상
robot inverse kinematics
'취미 > 3D Printer 로봇팔' 카테고리의 다른 글
| 3D Printer 로봇팔 제작 - 10 (0) | 2021.03.11 |
|---|---|
| 3D Printer 로봇팔 제작 - 9(하드웨어 변경) (0) | 2020.02.03 |
| 3D Printer 로봇팔 제작 - 6 (SW 설계) (0) | 2019.04.06 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |