작성 중~
'취미 > 3D Printer 로봇팔' 카테고리의 다른 글
| 3D Printer 로봇팔 제작 - 9(하드웨어 변경) (0) | 2020.02.03 |
|---|---|
| 3D Printer 로봇팔 제작 - 7 (0) | 2019.07.18 |
| 3D Printer 로봇팔 제작 - 6 (SW 설계) (0) | 2019.04.06 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |
작성 중~
| 3D Printer 로봇팔 제작 - 9(하드웨어 변경) (0) | 2020.02.03 |
|---|---|
| 3D Printer 로봇팔 제작 - 7 (0) | 2019.07.18 |
| 3D Printer 로봇팔 제작 - 6 (SW 설계) (0) | 2019.04.06 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |
오랜만에 로봇팔 포스팅입니다.
직장 일이나 집 이사가 있어서 계속 포스팅을 미루고 있었네요. 블로그 작성하면서 사람들 의견도 듣고 싶었는데 쉽지 안네요.~ 서로 도움이 될 부분이 무엇일까~ ㅎㅎ
지금까지 만들던 로봇 팔은 하드웨어적으로 문제가 있었고, 출력 필라멘트 소재가 깨지고, 갈라지는 현상이 있었습니다. 처음 3D 프린터를 사용하면서 소재에 대한 생각이 짧았네요.
일단 지금까지 만들었던 로봇팔은 분해 했습니다. 만드는 시간도 오래 걸렸지만 분해하는 건 금방 걸렸어요.
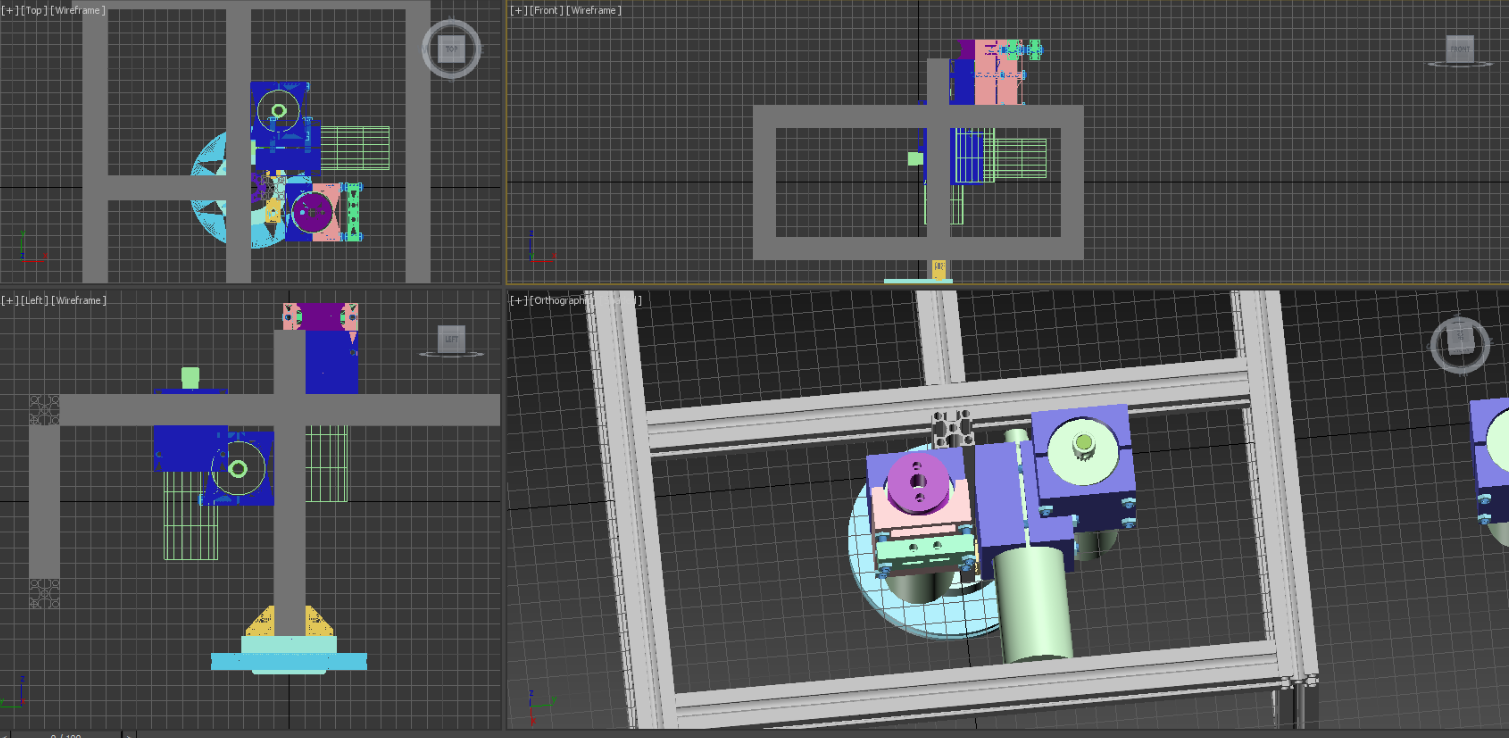
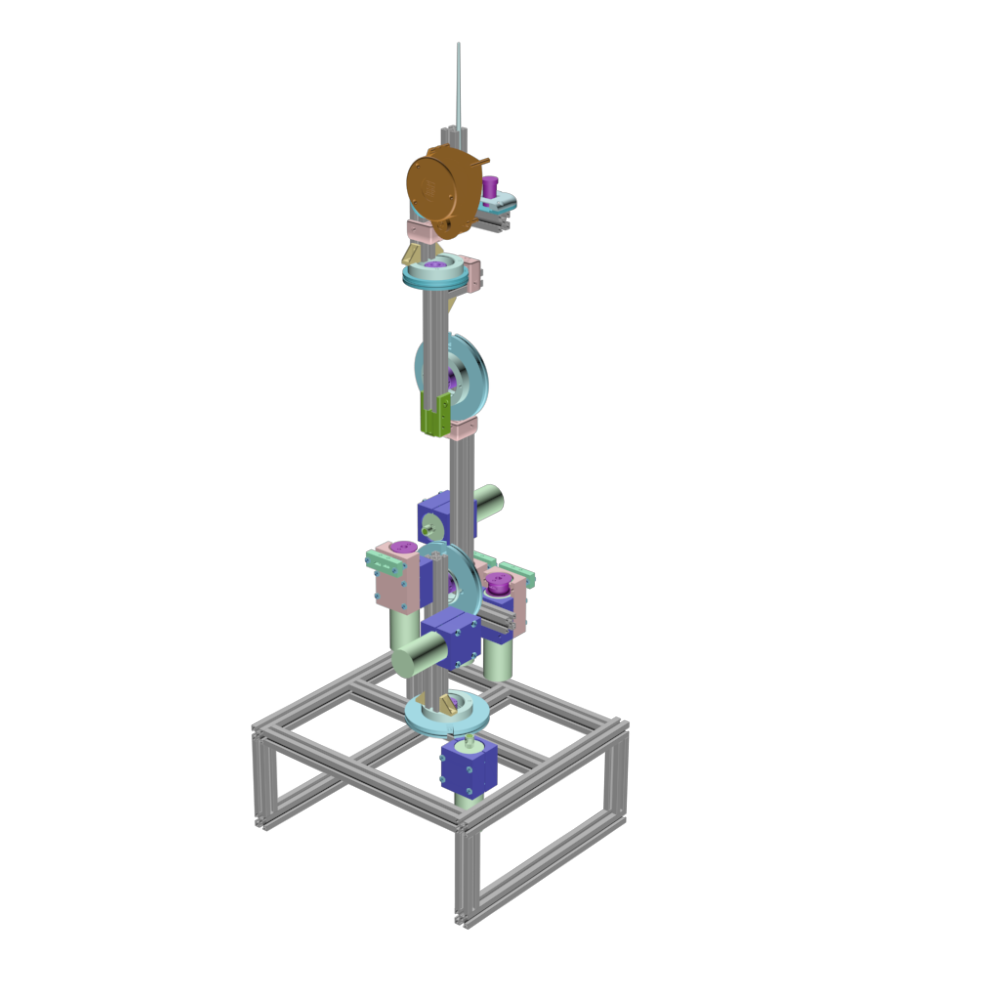
그리고 이번에 다시 제작한 방식은 와이어를 사용하지 않고 타이밍벨트를 이용한 방식으로 재 구성했습니다.
Fusion 360 프로그램을 이용해서 만들었는데 생각보다 금방 배우고 사용할 수 있었습니다.

ABS 소재를 이용하여 출력했고, PLA에 보다 좀 더 단단한 느낌힘니다. 예전처럼 깨지는 일은 없을 듯합니다.
프린터가 2대가 있으니 기다리는 시간도 줄어들고 만드는 시간을 단축할 수 있었어요 ㅎㅎ
그리고 계속 프린팅 하다 보니 설계할 때도 수축을 감안해서 설계할 수 있게 되었습니다. 이 부분이 로봇 암 만들면서 가장 발전했네요. ㅎㅎ


시간이 없어서 자세한 설명은 다음 포스팅에 올리도록 하겠습니다.~
| 3D Printer 로봇팔 제작 - 10 (0) | 2021.03.11 |
|---|---|
| 3D Printer 로봇팔 제작 - 7 (0) | 2019.07.18 |
| 3D Printer 로봇팔 제작 - 6 (SW 설계) (0) | 2019.04.06 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |
ABS 필라멘트를 사용하면서 수축현상으로 챔버가 필요했습니다. 수축 현상뿐만 아니리 소음, 냄새 때문에 밀봉해버릴 필요가.. 있었죠.
이것은 차음재 입니다. 3D 프린터에 사용될 녀석입니다. 안전하게 사용하기 위해서 난연 소재로 선택했습니다.
물이 붙어도 바로 꺼짐니다.

작업실 수납장입니다. 한쪽칸을 챔버로 개조할 생각입니다.
차음재를 구석구석 붙이고 문틈에는 문풍지를 붙여서 공기가 밖으로 새어나가지 못하도록 잘 밀봉합니다.


진동을 잡을때는 벽돌이 최고입니다. ㅎㅎ
우퍼 스피터 진동을 잡을때 대리석 위에 올려두고 하잖아요? 똑같은 방법인데 문제가 스피커에 비해 프린터가 너무 무거운 점이죠.
프린터 진동을 잡기위해서 스펀지 위에 프린터를 올려 두는 방법도 있지만, 제가 가지고 있는 XY직교 프린터는 Y방향 흔들림이 남다릅니다. 스펀지 위에 프린터를 올려두면 덜컹덜컹 흔들려요 ㅋㅋ
벽돌 위에 프린터를 올려두는 방법으로 안정적으로 해결되었고, 파워서플라이는 벽돌 안에 집어넣어서 안전하게 사용할 수 있습니다.

끝...
3D 프린터를 돌릴때는 화재에 대한 신경을 많이 쓰고 있어요~
마음 같아서는 카메라도 설치해서 원격으로 전원 관리도 하고 싶습니다. ㅎㅎ
| 3D 프린터 소음개선 (1) | 2020.02.02 |
|---|---|
| 3D 프린터 수리 (0) | 2020.02.02 |
| [3D Printer] Flying Bear ghost 4S 리뷰 (0) | 2020.02.02 |
| [3D Printer] Anycubic kossel (delta 방식) 리뷰 (0) | 2020.01.28 |
모터 소음을 개선해줄 tmc2208로 모듈로 X, Y, Z 모듈 교체했습니다.
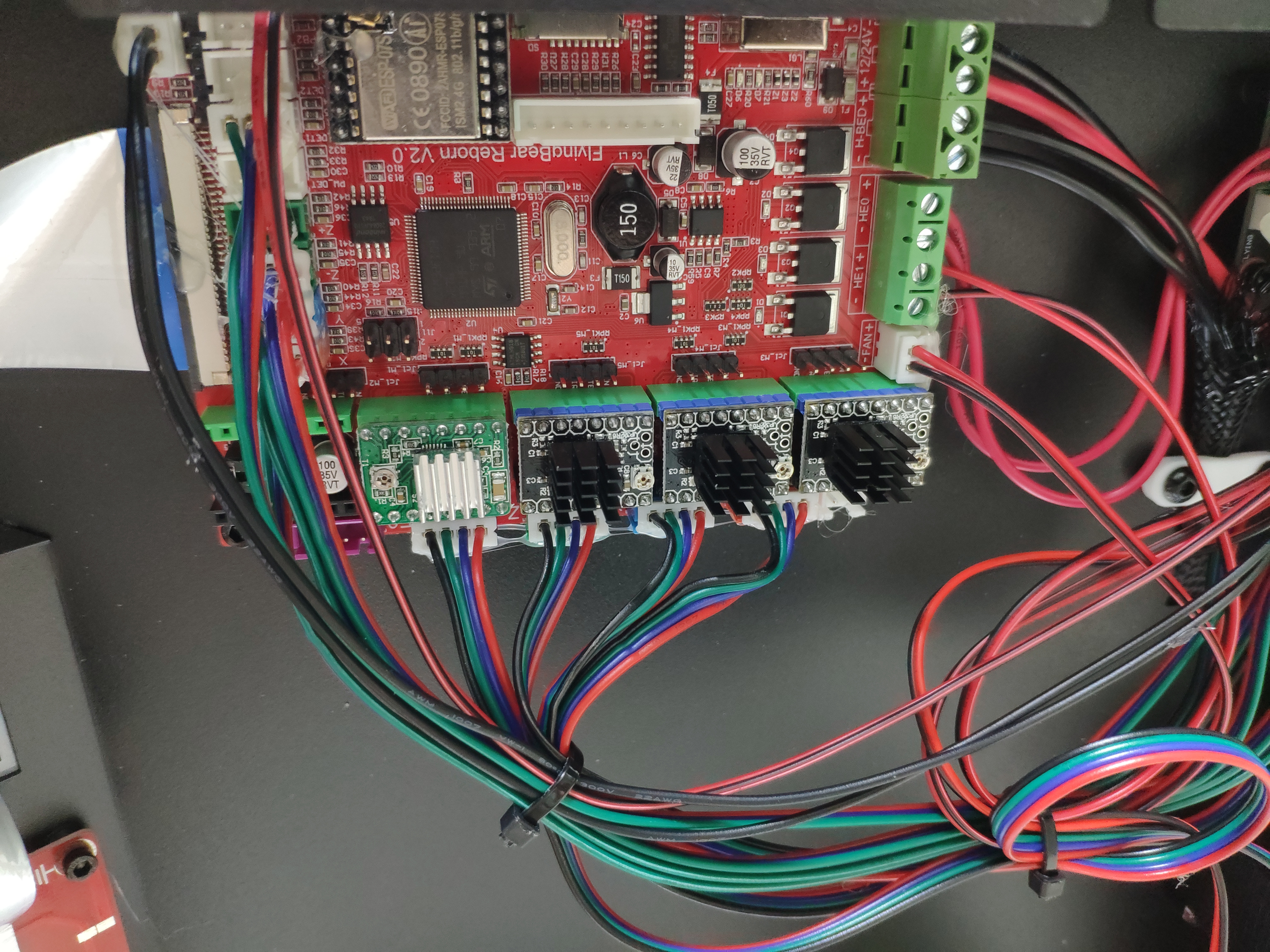
모터 드라이브를 변경으로 소음을 많이 개선되었습니다. 모터 소리가 안들리니까 이제는 팬소리가 계속 들리네요 ㅜ
그리고 뼈대가 철이라 그런지 Linear Guide 가 움직일때 전체가 좀 울립니다.
두 번째 개선으로 델타 프린터 입니다.
오래 사용하면서 정도 들고 계속 사용해야겠죠? ㅎㅎ
Anycubic kossel의 프린터를 사용하다 보면 설계가 좀 잘못된 부분이 있습니다. 보드와 핫 배드가 같이 만나고 있고, 모터 드라이브 발열을 해소할 방법이 없습니다. 처음부터 설계할 때 모터랑 보드를 위로 설계했으면 좋았을 것 같아요.
이 부분도 개조해야 될 사항입니다. ~
특히 델타에서는 LM guide 때문인 것인지 소음이 무소음에 가까워졌습니다. ㅎㅎ
| 3D 프린터 챔버 (0) | 2020.02.03 |
|---|---|
| 3D 프린터 수리 (0) | 2020.02.02 |
| [3D Printer] Flying Bear ghost 4S 리뷰 (0) | 2020.02.02 |
| [3D Printer] Anycubic kossel (delta 방식) 리뷰 (0) | 2020.01.28 |
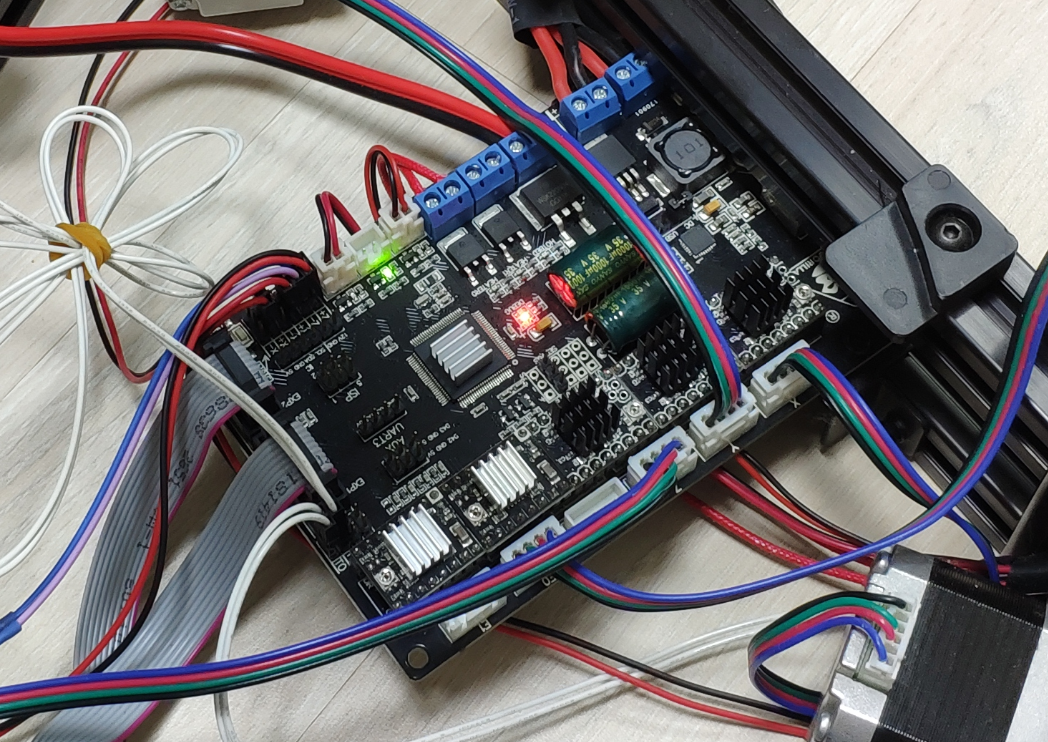
최근 델타 프린터에서 Thrmal runaway 현상이 발생되어 원인을 찾았어요.
처음에는 온도센서에 문제가 생겼구나 했는데, 점검해보니 파워서플라이 고장으로 알아냈어요.
사용 중에 온도가 떨어지면서, 이런 현상이 발생되는데 바로 문제가 나타나지 않고 출력 중에 발생되어서 좀? 스트레스 받았었습니다.
파워서플라이가 고장이라고 알게된 이유는 예전보다 hot bed 온도가 느리게 올라가는 것을 보고 직감했습니다. 파워서플라이 전압이 낮구나!!! 실제로 전압 체크해보니 9~10v 였습니다. (실제 12V가 정상)


민웰 산업용 파워서플라이 12v 350W로 교체해서 정상적으로 동작되고 있어요. 전원 입력시 바로 fan이 돌아가는 게 아니라 발열될 때만 fan이 돌아가서 무척 좋았습니다. ㅎㅎ


| 3D 프린터 챔버 (0) | 2020.02.03 |
|---|---|
| 3D 프린터 소음개선 (1) | 2020.02.02 |
| [3D Printer] Flying Bear ghost 4S 리뷰 (0) | 2020.02.02 |
| [3D Printer] Anycubic kossel (delta 방식) 리뷰 (0) | 2020.01.28 |
지금 가지 3D 프린터는 Delta 방식 프린터를 사용했습니다.
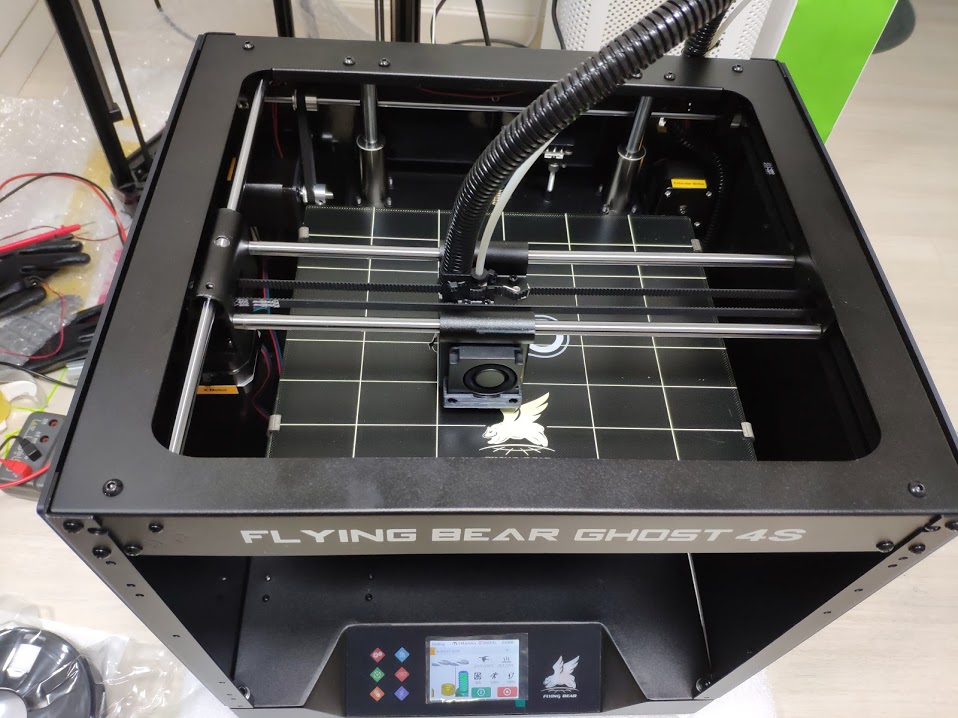
이번에 구매한 3D 프린터는 XY직교 프린터입니다.
일단 두 제품을 사용하다 보니 장점 단점이 보임니다.
먼저 가격면에서 차이가 있기 때문에 기존에 사용 중인 Anycubic 제품과 비교하기는 좀 무리가 있을 수 있지만
사용성면에서 Flying Bear가 많이 편합니다.
가장 편한점은 wifi로 무선으로 출력 데이터를 전송하는 부분!! 사소하지만 좋습니다.!!!
그리고 핫 배드 부분이 깔끔합니다. 배드 온도가 낮아지면 출력물을 자동으로 떨어집니다.!! Anycubic은 껌 칼로 조심조심 때야 했었죠..
마지막으로
Delta 방식과 XY 직교 방식에 차이입니다.
Delta 방식은 모터가 직접적으로 움직이는 관성이 동일할 수 있습니다. 이런 점이 고속 출력, 소음면에서 장점을 갖는 것 같습니다.
직교 방식에 비해 높은 출력물을 뽑을때는 Delta 방식의 부피가 더 높아지게 됩니다.
XY 직교 방식은 Calibration 방법이 비교적 간단하고, 대형 출력물을 뽑기 유리합니다.
FlyBear 제품은 모터 동작과, 팬 소음이 큽니다. 그리고 뼈대가 철이라서 통 울림이 있습니다.
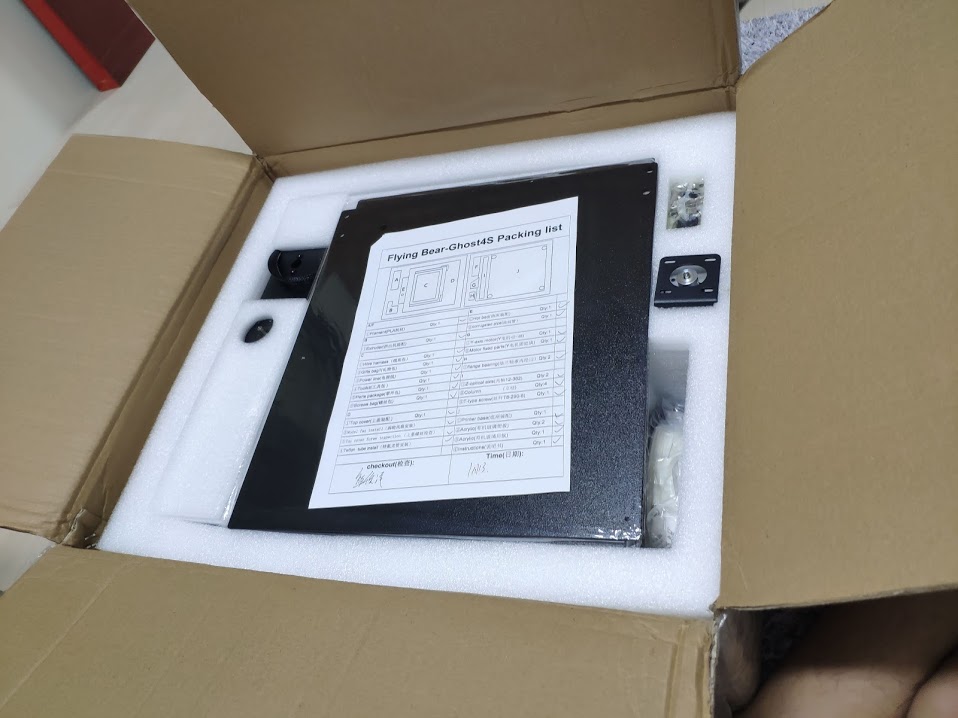
프린터 개봉기 및 조립 후기예요~

짜잔!! 첫 개봉~~
조립 반제품이기 때문에 조립하는데 금방 걸렸습니다. 1시간 정도 걸린 것 같아요.
영상에 프린터 동작 소음을 보실 수 있습니다. ㅎㅎ 친구에게 보낸 영상이었어요..

기존에 가지고 있던 델타 프린터와 이번에 구매한 프린터입니다.
이렇게 집안에서 프린터를 출력할 때 소음, 실내공기, 실내온도 등 신경 써야 할 점이 있습니다. ~
| 3D 프린터 챔버 (0) | 2020.02.03 |
|---|---|
| 3D 프린터 소음개선 (1) | 2020.02.02 |
| 3D 프린터 수리 (0) | 2020.02.02 |
| [3D Printer] Anycubic kossel (delta 방식) 리뷰 (0) | 2020.01.28 |
3D 프린터 입문 용도로 사용한 장비입니다. 3년 전에는 판매 중이었는데 지금은 판매하지 않고 있네요. ㅠ
1년 이상 사용하다 보니 무리 없이 원하는 출력물을 뽑을 수 있게 되었습니다.
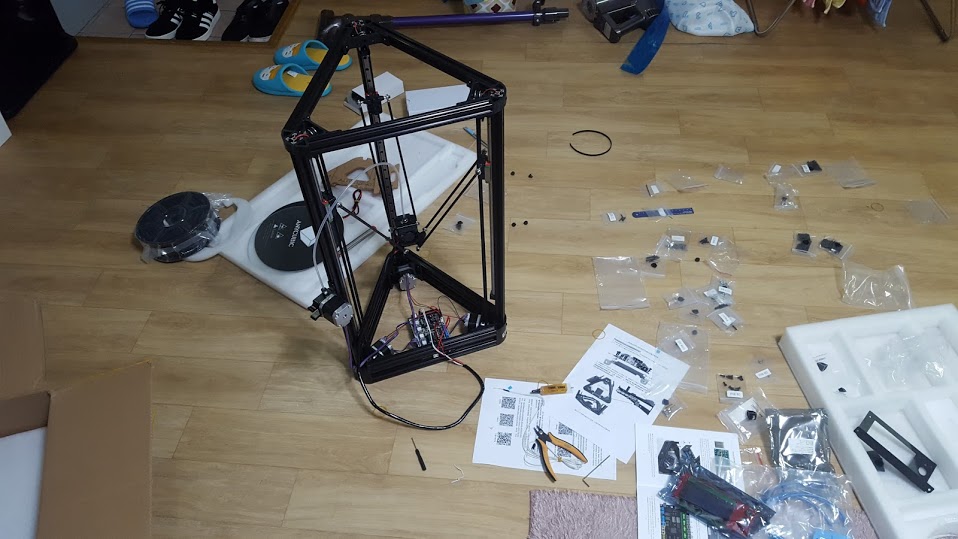
처음 프린터 조립과정이에요~

하나도 조립되지 않은 상태로 배송되어 펌웨어까지 전부다 수동으로 작업을 해야 합니다.
일단은 손재주 없는 사람은 구매하시면 힘들 것 같네요 ㅎㅎ

몇몇 부품은 3D 출력 물로 구성되어 있고, 많은 볼드 너트들이 있습니다.
그래도 설명서는 친절해서 다행이죠

설명서대로 ~~ 착착
회사 퇴근 후에 잠도 안 자고 작업했었네요 ㅎ

작업 공간이 어지럽네요ㅜㅠ
하루 만에 조립하려고 완전 집중 상태..
컨트롤 보드에 펌웨어를 넣으려고 하는데 USB를 연결했는데 장치 전원이 안 들어온다??
고장인 것인지 조치하기 위해 직접 보드에 serial 접속!!
아두이노 부트로더 동작되는 것을 확인!!
나중에 알고 보니 보드에 12v 입력하면 되는 일이었습니다. ㅋㅋㅋ

출력 테스트 진행
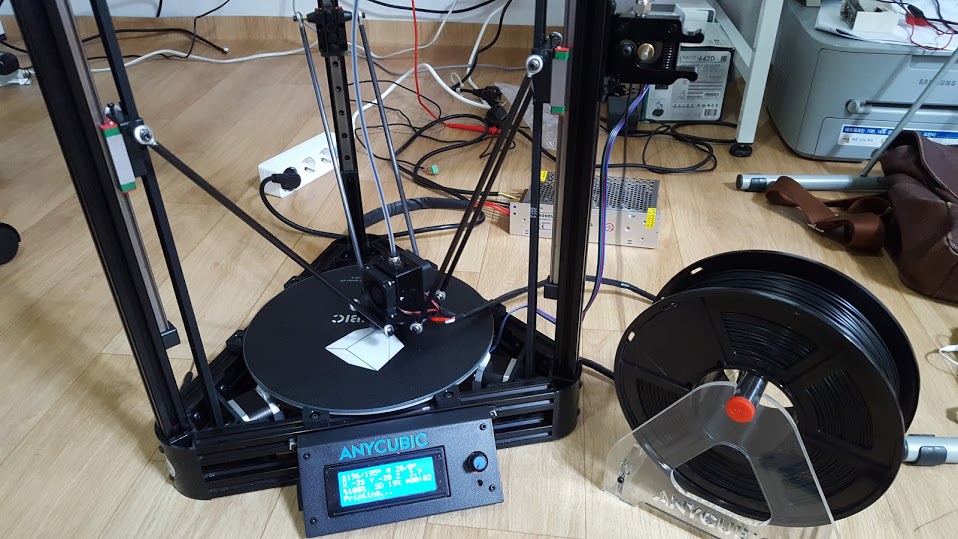
출력 결과~~
첫 출력이 문제없이 동작되어서 행복합니다.ㅎㅎ

캘리브레이션 과정 사진이 누락되었는데 바닥 보정하기가 상당히 까다로웠습니다. ㅜㅜ
출력 결과는 좋았지만, 수치가 조금 다른 현상 때문에 한동안 고생했었네요
문제 도 좀 생기지만 하나씩 보완하면서 지금까지 잘 사용하고 있습니다. ^^
| 3D 프린터 챔버 (0) | 2020.02.03 |
|---|---|
| 3D 프린터 소음개선 (1) | 2020.02.02 |
| 3D 프린터 수리 (0) | 2020.02.02 |
| [3D Printer] Flying Bear ghost 4S 리뷰 (0) | 2020.02.02 |
안녕하세요. 평생개발자 입니다.
로봇팔 제작 프로젝트 7번째 포스팅!!!
취미로 시작해서 점점 프로젝트가 커지고 있습니다. 재미가 있다가도 집에서 일하는 것 같고 직장 일과 묘하게 겹치면서 집에서도 근무하는 느낌입니다.
이번 포스팅은 SW 에서 로봇 동작을 시뮬레이션하고, 실제로 로봇이 실제 위치로 움직이는 것을 목표로 두고 있습니다.


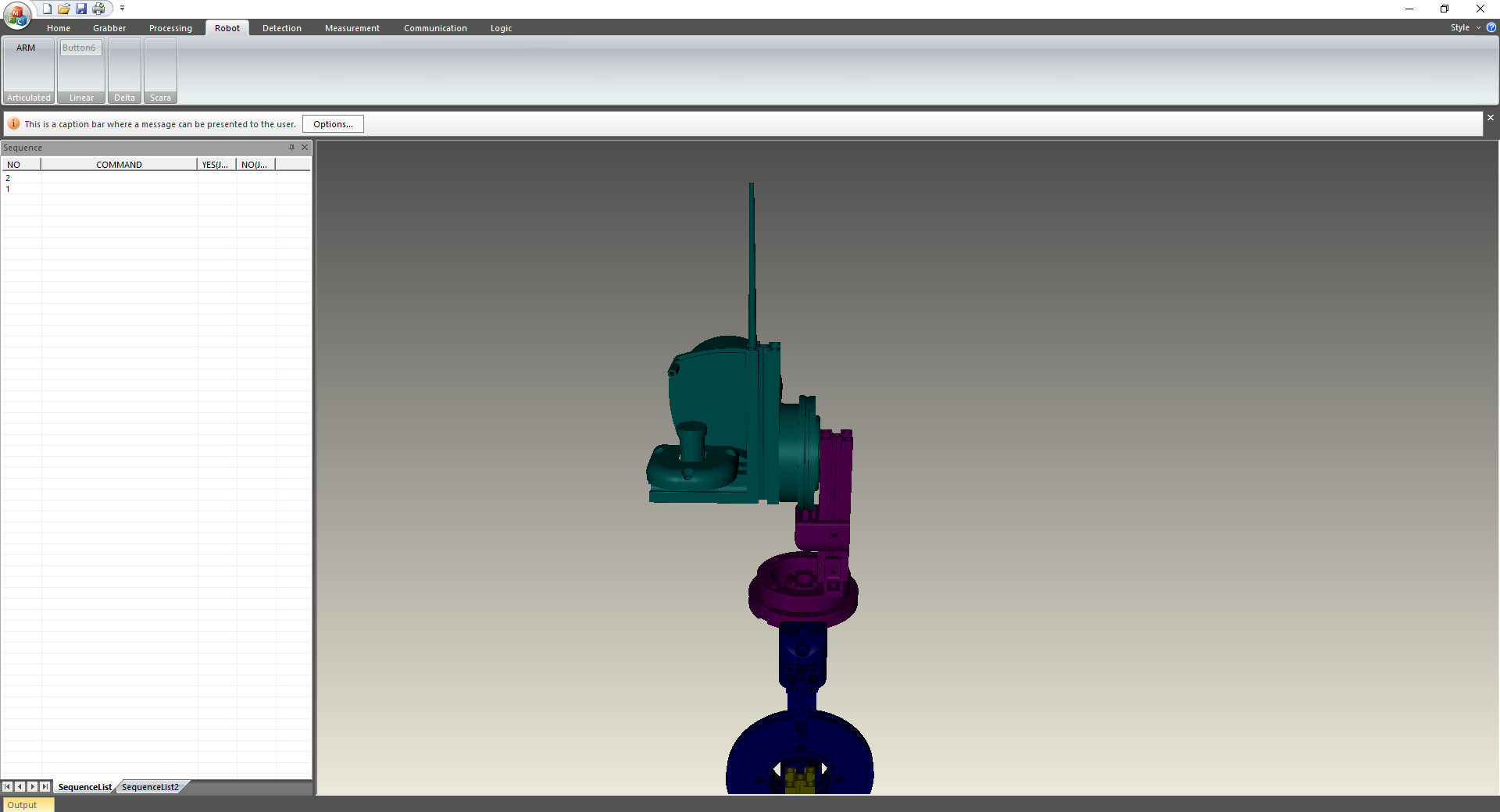
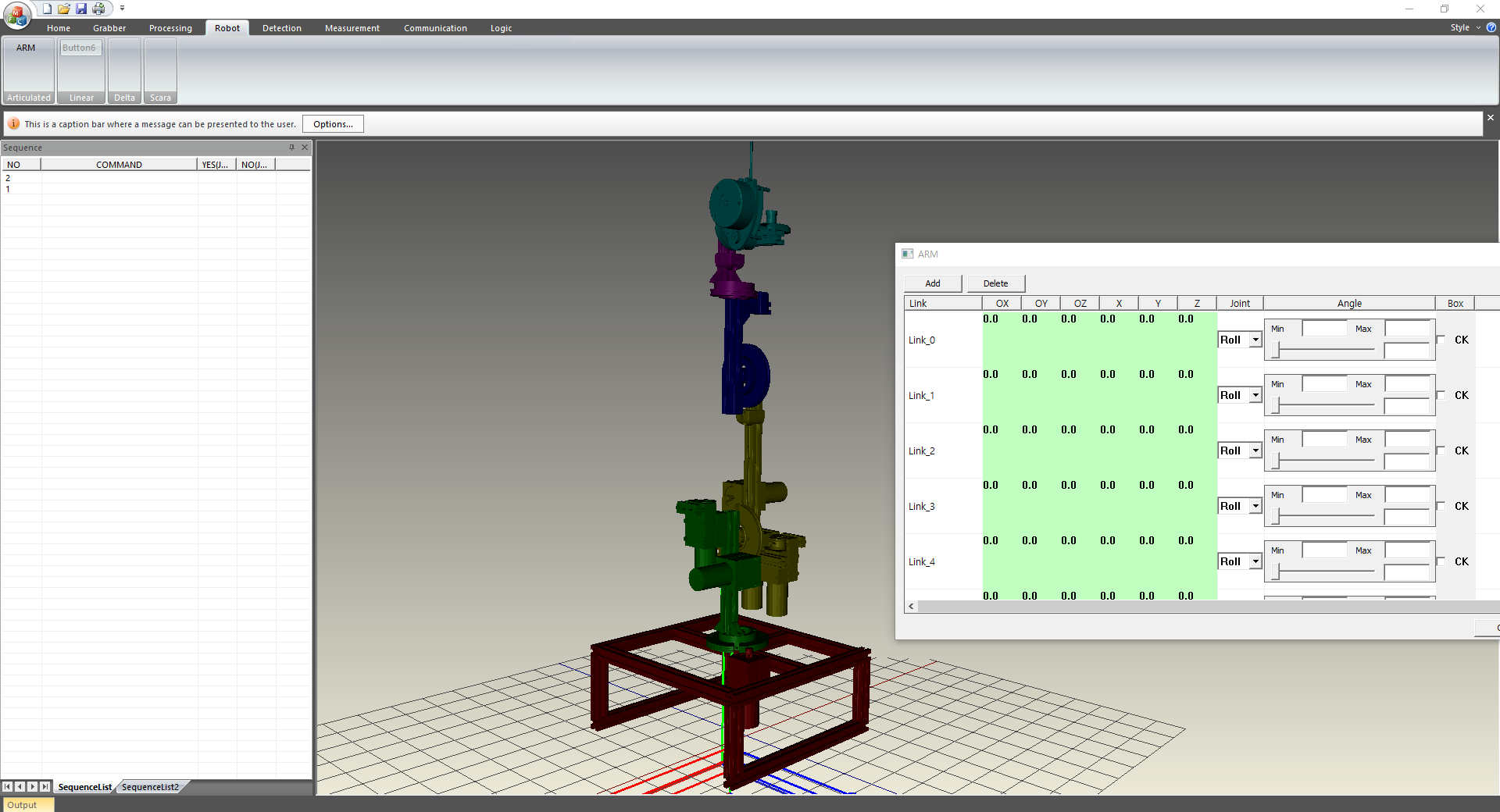
로봇 시뮬레이션에 필요한 inverse kinematics, 충동 체크, Lader scan 등을 수행하기 위한 GUI
사용된 SW library
Eigen : 선형대수 계산
OpenGL : 그래픽 표현
MFC : 윈도우 프레임 GUI
로봇 DOF 각도 테스트 영상
robot inverse kinematics
| 3D Printer 로봇팔 제작 - 10 (0) | 2021.03.11 |
|---|---|
| 3D Printer 로봇팔 제작 - 9(하드웨어 변경) (0) | 2020.02.03 |
| 3D Printer 로봇팔 제작 - 6 (SW 설계) (0) | 2019.04.06 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |
안녕하세요. 평생개발자 입니다.
로봇팔 제작 프로젝트의 6번째 게시글입니다. 초기 계획 단계부터 지금까지 1년의 시간이 지낫네요 ㅠㅜ
아무래도 직장생활을 하면서 취미생활로 추가적인 로봇팔 프로젝트를 진행하다보니, 집에서 작업하는 게 가끔은 업무처럼 느껴집니다.
로봇팔 SW개발하기 앞서 Visual Studio에서 제공하는 UML 프로젝트로 먼저 SW 설계를 진행했습니다. startUML로 초기 설계를 했었는데 너무 오래된 툴이기도 하고, 처음으로 Visual Studio UML를 사용해보고 있습니다.
프로젝트 요구사항은
1. 모듈화 및 확장성 다양화
2. 2D, 3D Viewport개발
- 역기구 알고리즘 (로봇 관절 시뮬레이션)
3. Robot Bin Picking
- Template matching (end effector 카메라 이용)
4. 병렬화 처리 (multi core, simd)
5. 캘리브레이션
이제 간단하게 프로젝트 진행 과정을 살펴보겠습니다.

VST(VisionSimulationTool) 프로젝트 생성
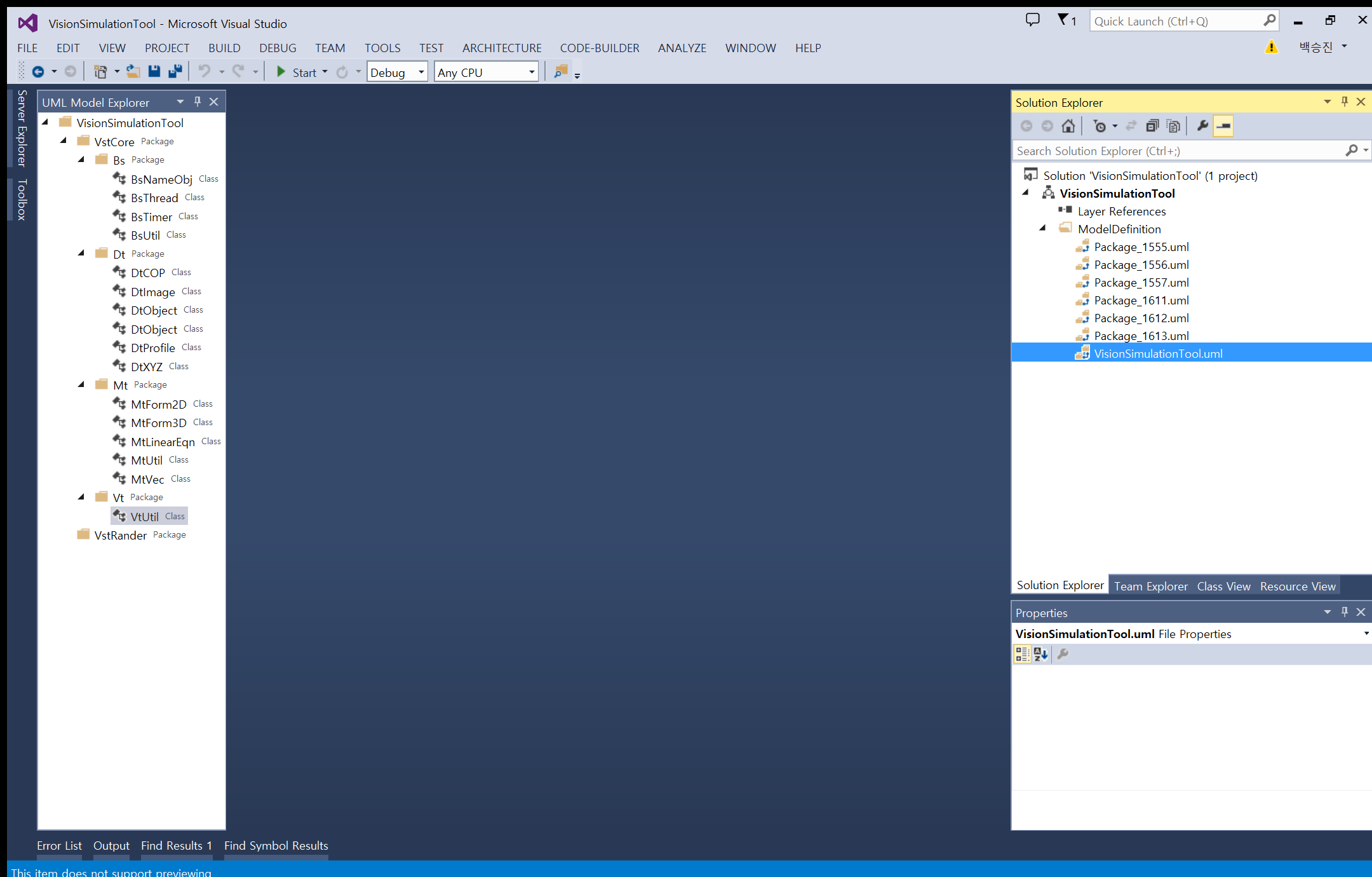
프로젝트 생성 후 예상되는 개발 시나리오에 요구되는 클래스를 추가합니다.
그리고 모듈화 상속관계를 예상하고, 인터페이스를 설계하고 정의합니다.
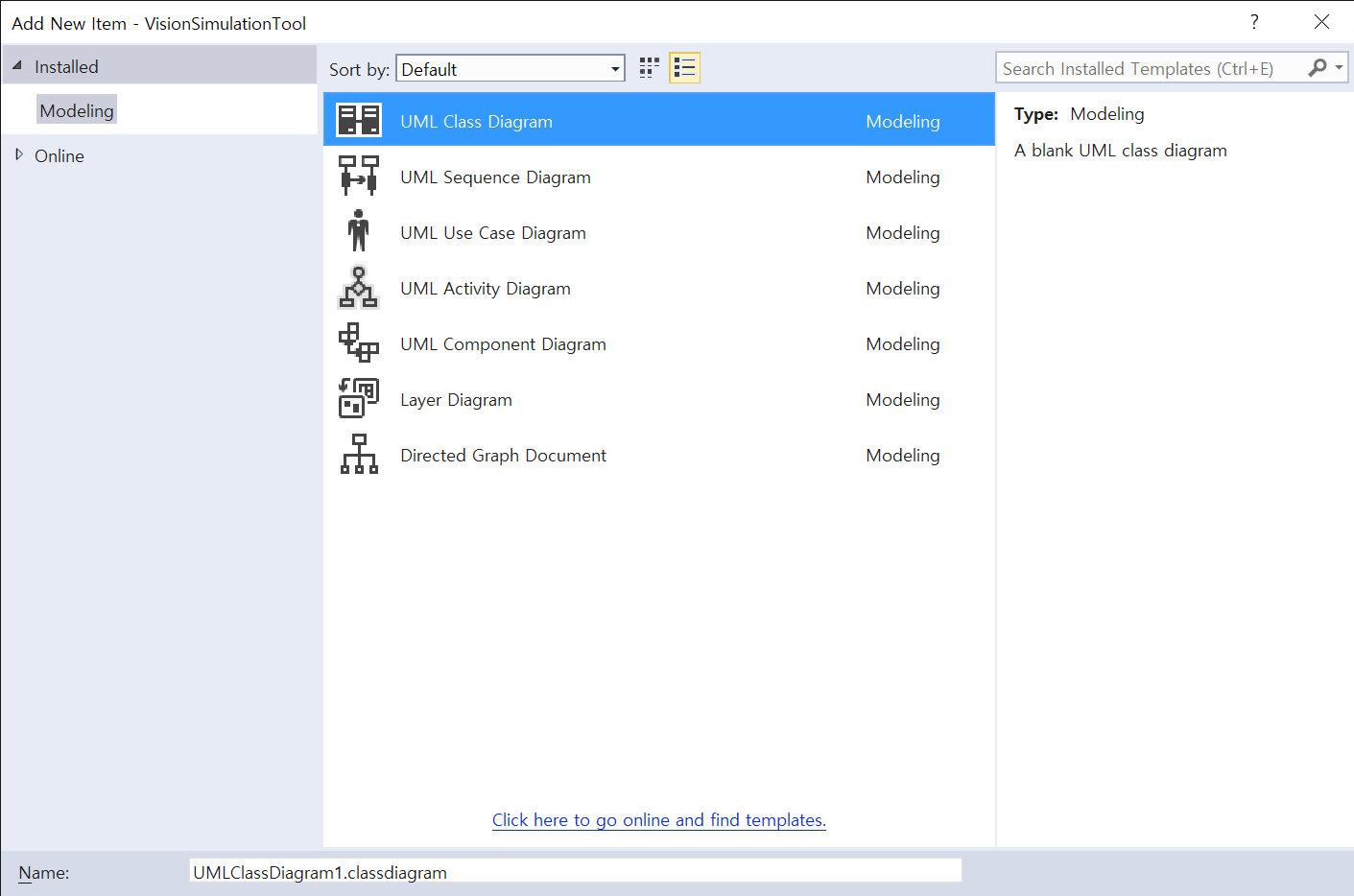
앞서 클래스를 추가 후 클래스 다이어그램을 생성합니다. (클래스 다이어그램에서 클래스를 추가하셔도 무방)
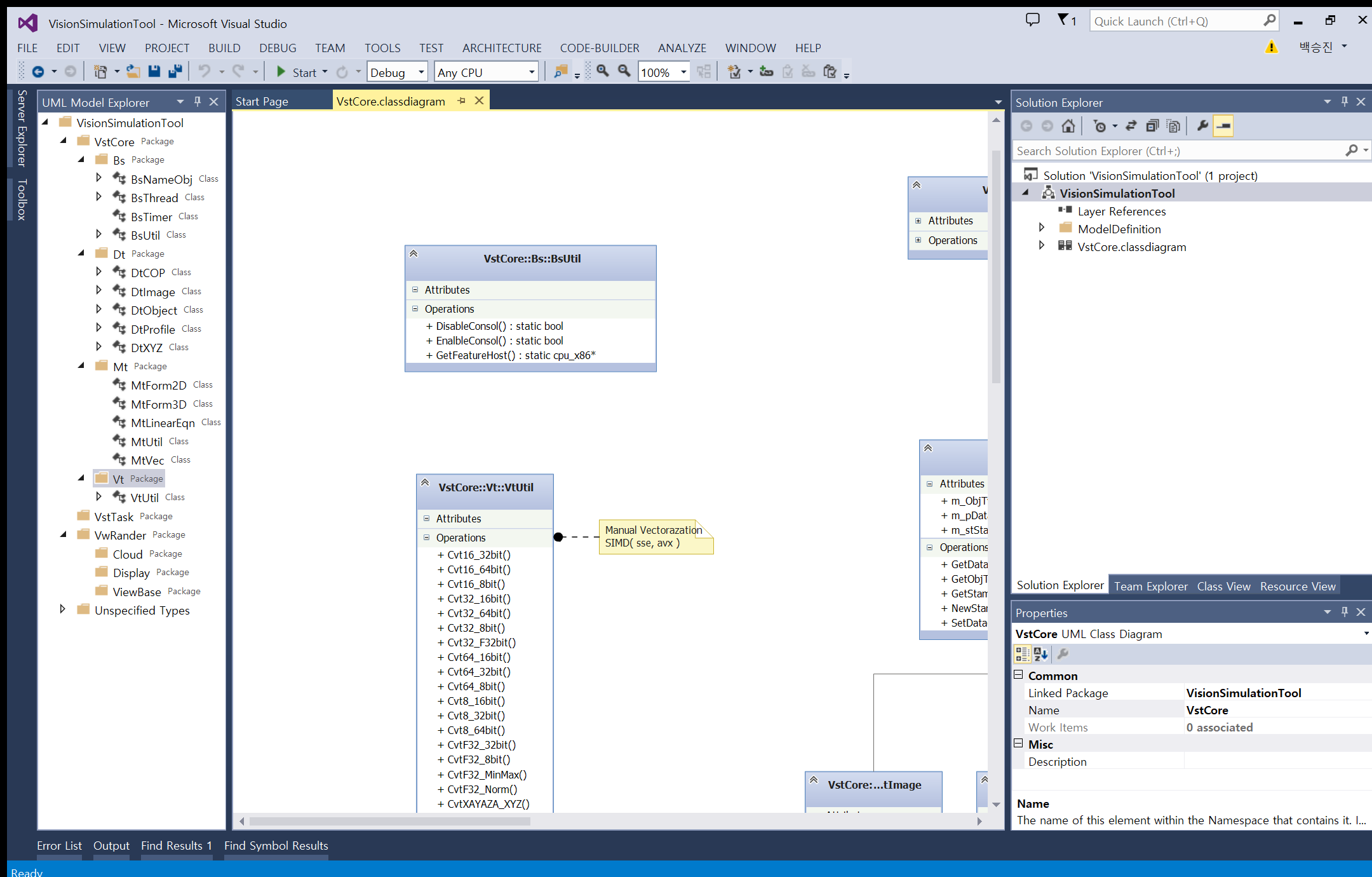
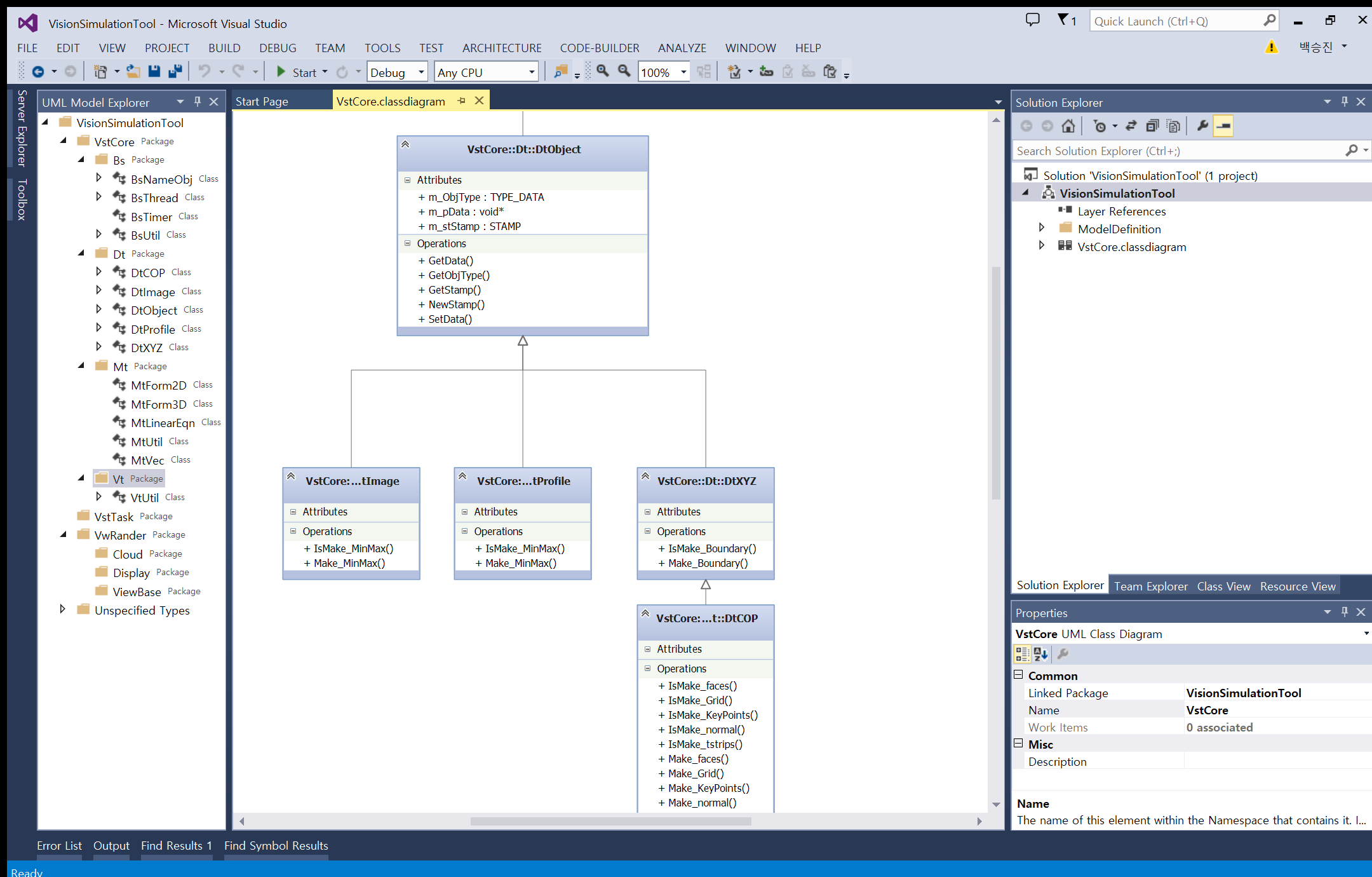
클래스 다이어그램에서 클래스의 관계를 연결 짓습니다. 개발 스타일마다 다르겠지만, 저 같은 경우 처음 큰 틀로 클래스 구조를 잡고, 세부 클래스 변수, 함수를 추가합니다.
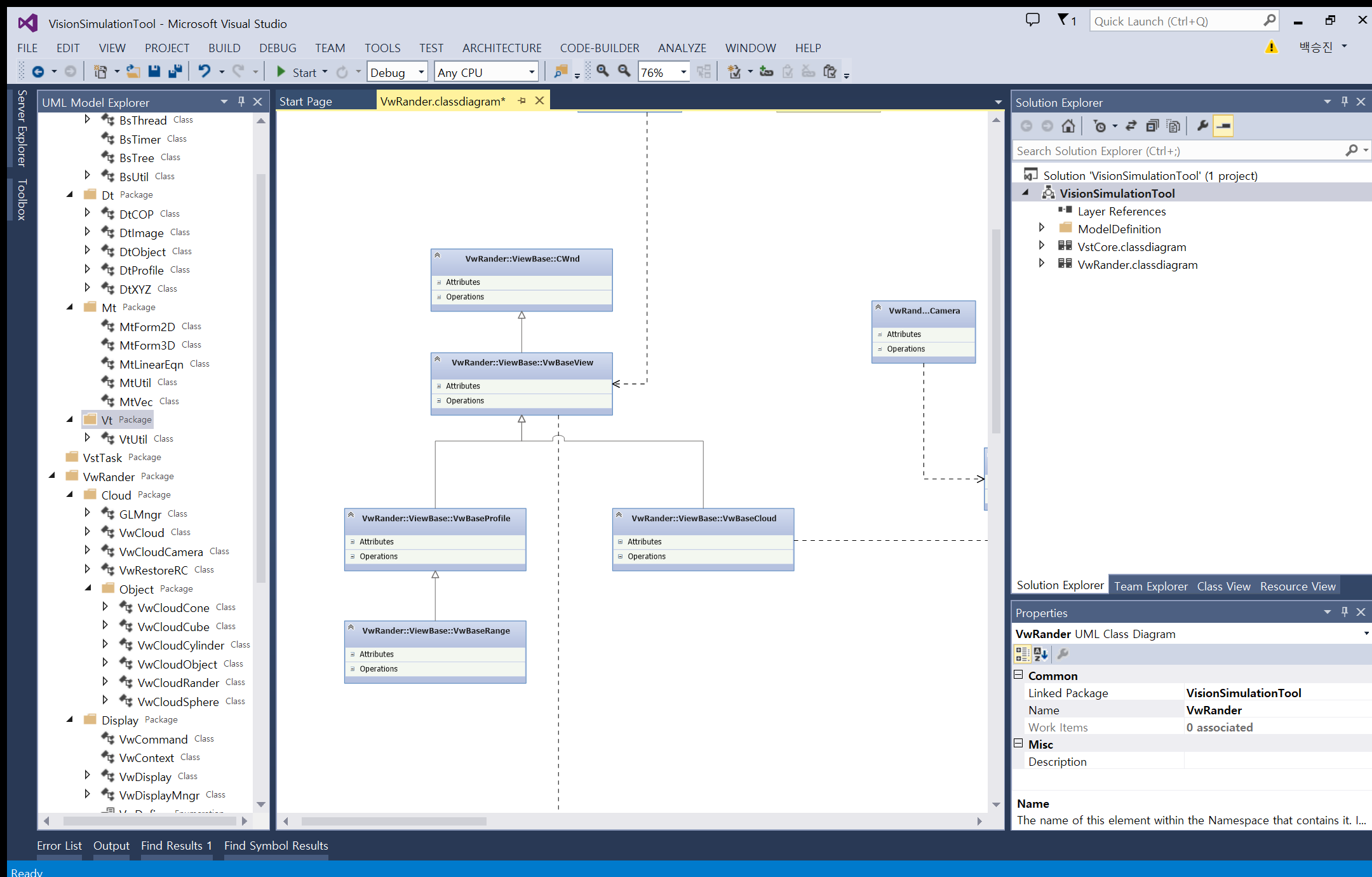
Cwnd를 상속받는 VwBaseView는 자식의 2D, 3D, Profile(Chart)를 관리하고, 상황에 따라서 스위칭 가능한 구조로 설계를 하였습니다.
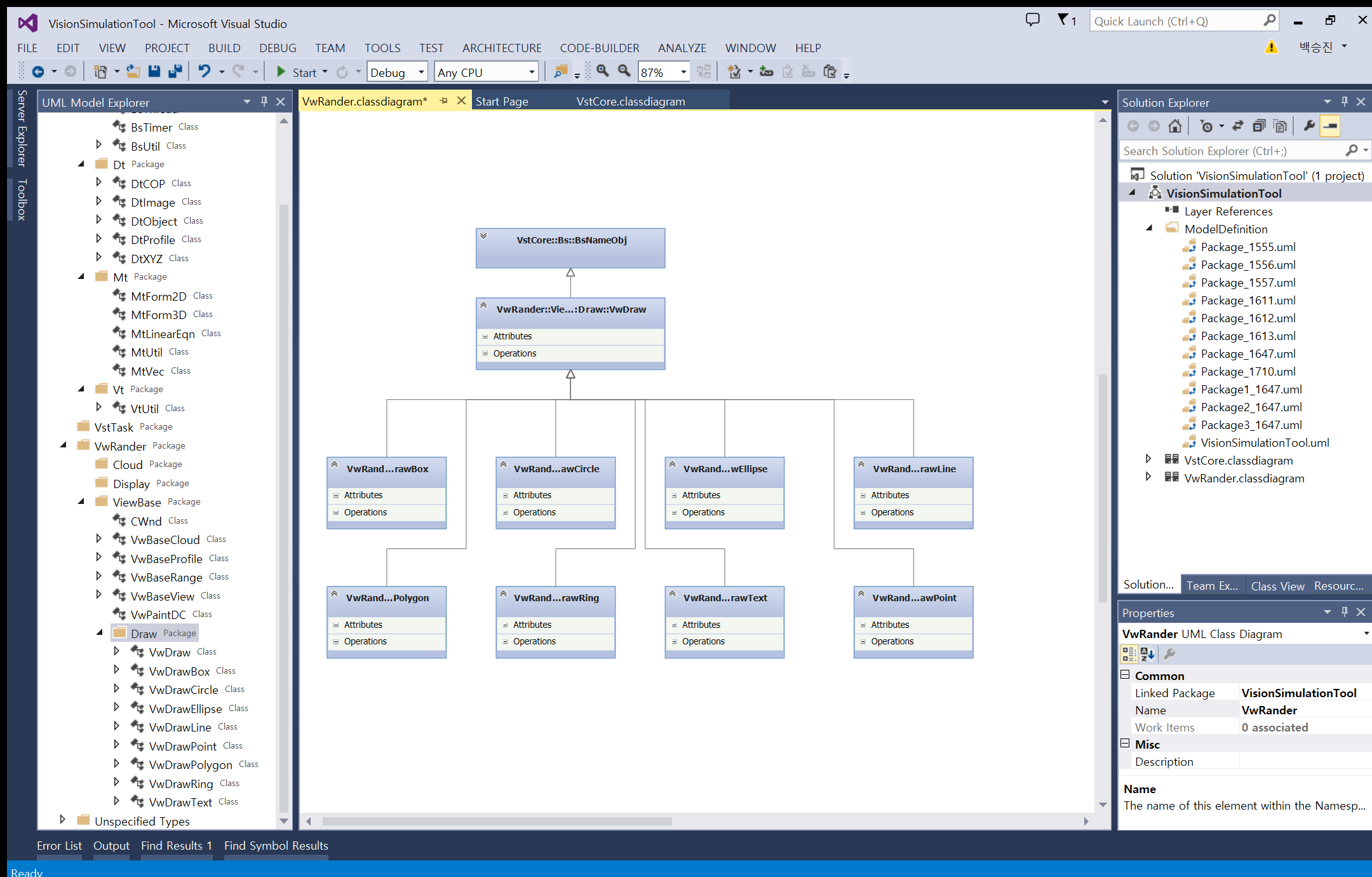
VwBaseView 클래스에 정의된 2D DrawItem 은 상위 부모인 BsNameObj의 클래스 이름을 검색하여 Item를 찾는 구조로 설계하였습니다.
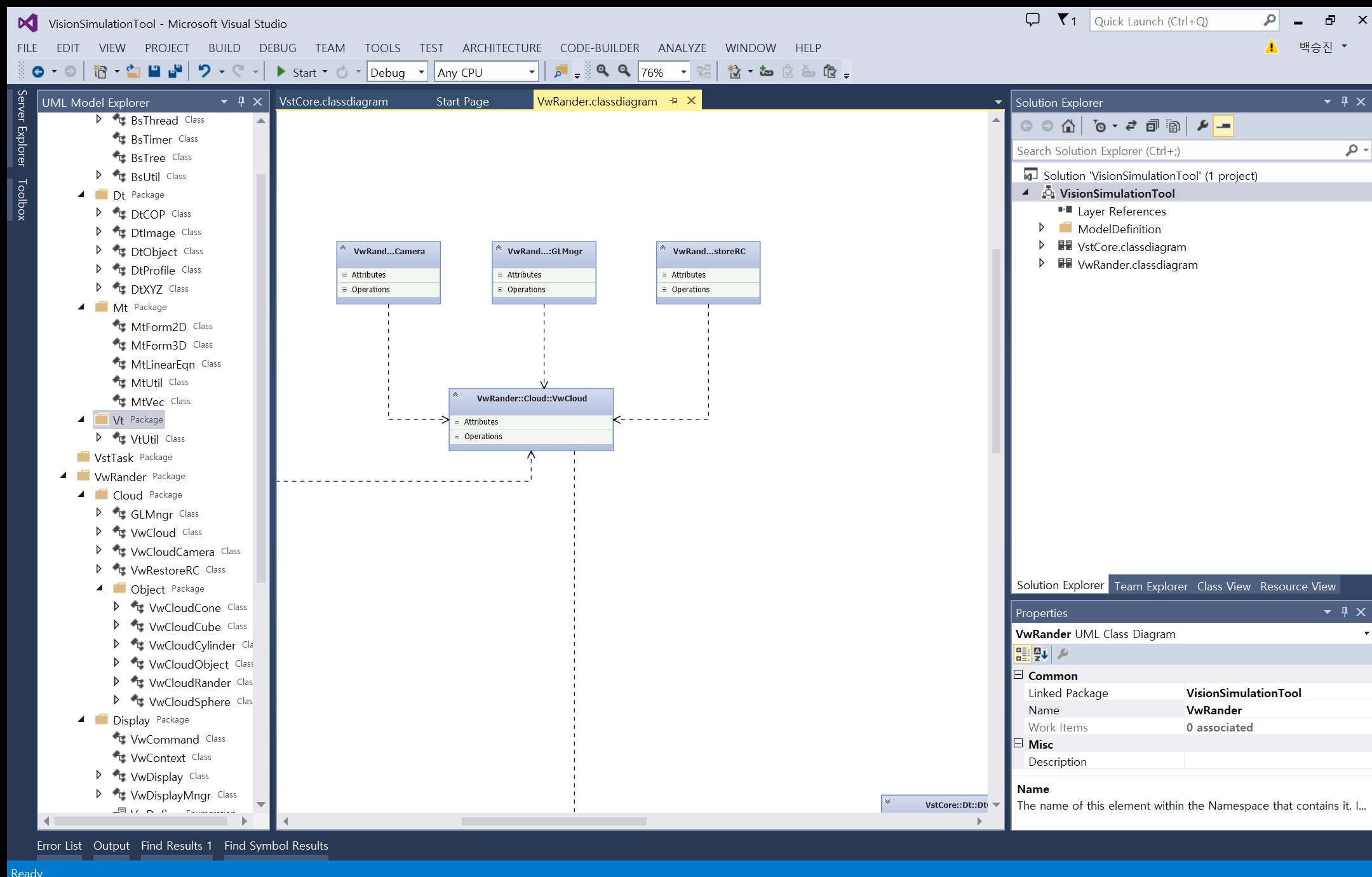
VwCloud 클래스에 정의된
GLMngr 클래스 : (GLSL, VBO, CallList)
VwRestoreRC : openGL 리소스 할당, 해지
VwCloudCamera : 3D Viewport 시점 관리
데이터 탐색으로 KDTree 사용 - 8~16 step
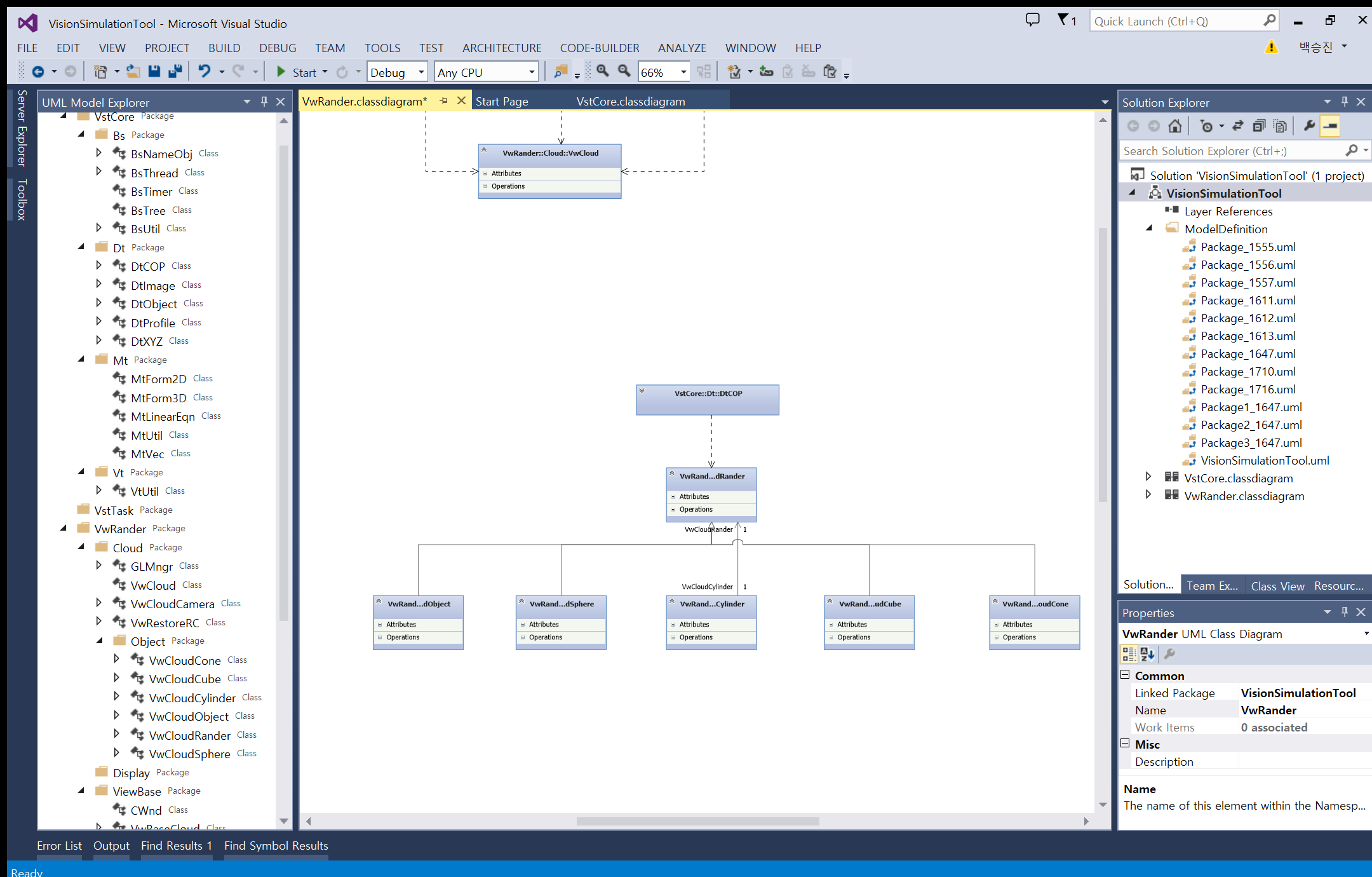
VwCloud 클래스에 정의된 Object Item으로 순서대로 Paint가 되는 구조며, 각각 Object의 Metrix 가 존재함.

구조를 다시 잡아야 하는 상황을 사전에 방지하기 위해선 반드시 SW 구조 설계하면서 구현에 필요한 기술을 사전에 많이 조사하고 정리하는 습관을 연습하고 있습니다.
이제 각각의 예상되는 클래스에 변수, 함수를 정의하고, 구현합니다. 현제 개발 진행도는 50% 정도 되었습니다.
3D 데이터 구조를 잡으면서 가장 혼란스러웠던 부분이 SOA <-> AOS를 병행 하는 구조, 그리고 SIMD 처리하면서 발생되는 메모리 처리였던 거 같습니다. SOA <-> AOS 변환은 SSE, AVX 두 개가 거이 동일한 성능 차이를 보이고, 포인트 수에 따라 차이는 있지만 SISD 보다 약 1.5배 이상 성능 차이를 보입니다.
이해를 돕기 위해 코드로 생각해보면
struct Point
{
float x;
float y;
float z;
}
Point pt [1000]; //SOA 구조
//AOS 구조
float x [1000];
float y [1000];
float z [1000];
이렇게 됩니다.
병렬 처리에 유리한 구조가 AOS 가 되고, 렌더링 Shader에 보내기 위해 SOA 구조로 변경하게 됩니다. (vertex shader copy 하기 유리함.)
다음 포스팅에서는 로봇에 붙어있는 Laser distance Sensor 데이터를 360도 맵핑해서 3D로 렌더링 하는 프로그램을 보여드리겠습니다.
by. 평생개발자
| 3D Printer 로봇팔 제작 - 9(하드웨어 변경) (0) | 2020.02.03 |
|---|---|
| 3D Printer 로봇팔 제작 - 7 (0) | 2019.07.18 |
| 3D Printer 로봇팔 제작 - 5 (1) | 2018.06.09 |
| 3D Printer 로봇팔 제작 - 4 (3) | 2018.05.05 |
| 3D Printer 로봇팔 제작 - 3 (1) | 2018.02.05 |
안녕하세요. 평생개발자 입니다.
예전에 연구하면서 발표한 자료 입니다.
카메라에서 발생되는 오차를 외부에서 얻은 데이터를 fusion하여 오차를 갱신 하는 방법을 제안하고, 실험된 자료 입니다.
내용을 압축해서 말씀드리자면,
카메라 외부 파라미터에서 카메라 회전에 관전된 부분과 IMU의 센서에 나온는 각도를 결합하여 Top View 의 영상처리를 유리하게 만든것 입니다.
용도는 흔들리는 자동차에서 차선을 유리하게 검출 할 수 있도록 하는것 입니다.
다른 용도로도 사용될 수 있겠지요.
데이터를 찾을수가 없어서 일단 영상부터 업로드 합니다. ^^
 |  |
| 3D 정합 ICP(Iterative closest point) (1) | 2016.11.29 |
|---|---|
| Bilateral Filtering (0) | 2016.11.20 |
| 강체(Rigid)와 호모그래피(Homography) 변환 (1) | 2016.07.28 |
| Horn and Schunck Flow 구현 및 회전중심 찾기 (0) | 2016.07.06 |
| 영상처리 UI Tool (0) | 2016.07.06 |